Recent news:
03.05.2024
CVPR 2024 publication
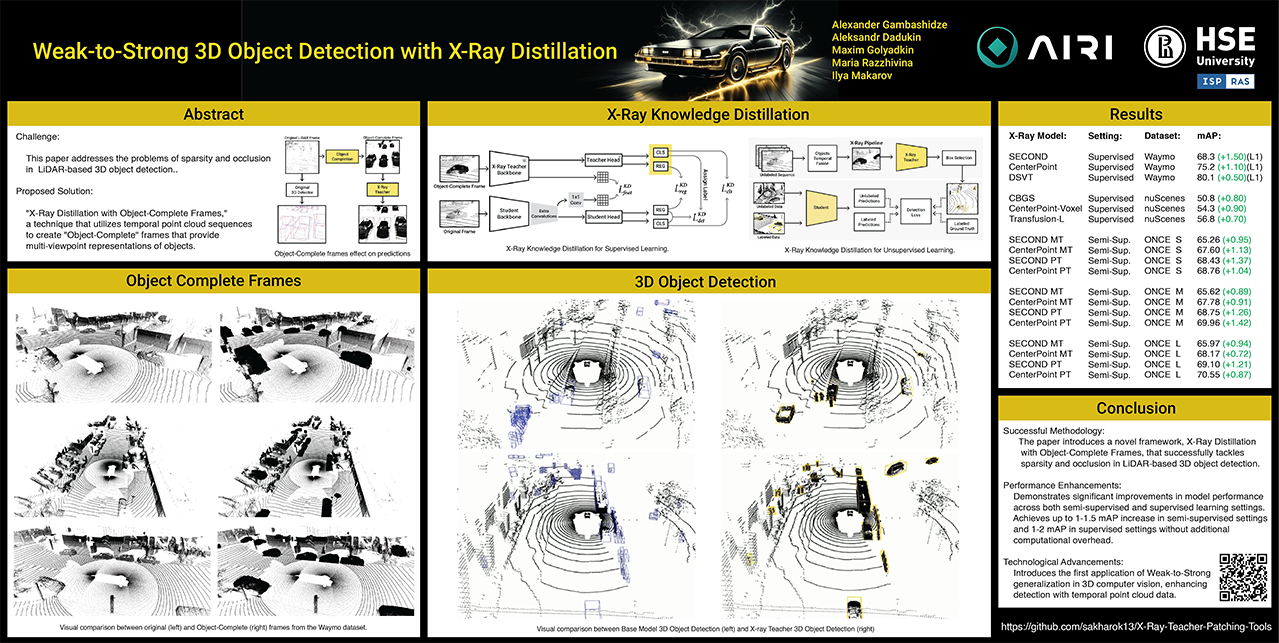
Our paper's poster for CVPR 2024, titled 'Weak-to-Strong 3D Object Detection with X-Ray Distillation,' is all done.
This paper addresses the challenges of sparsity and occlusion in LiDAR-based 3D object detection by introducing X-Ray Distillation with Object-Complete Frames, a versatile technique that integrates into any existing framework. By leveraging temporal point cloud sequences, this method creates comprehensive Object-Complete frames and utilizes a Teacher-Student framework for knowledge distillation, surpassing state-of-the-art performance in semi-supervised learning and improving established supervised models.


18.04.2024
Joining the Codebar family
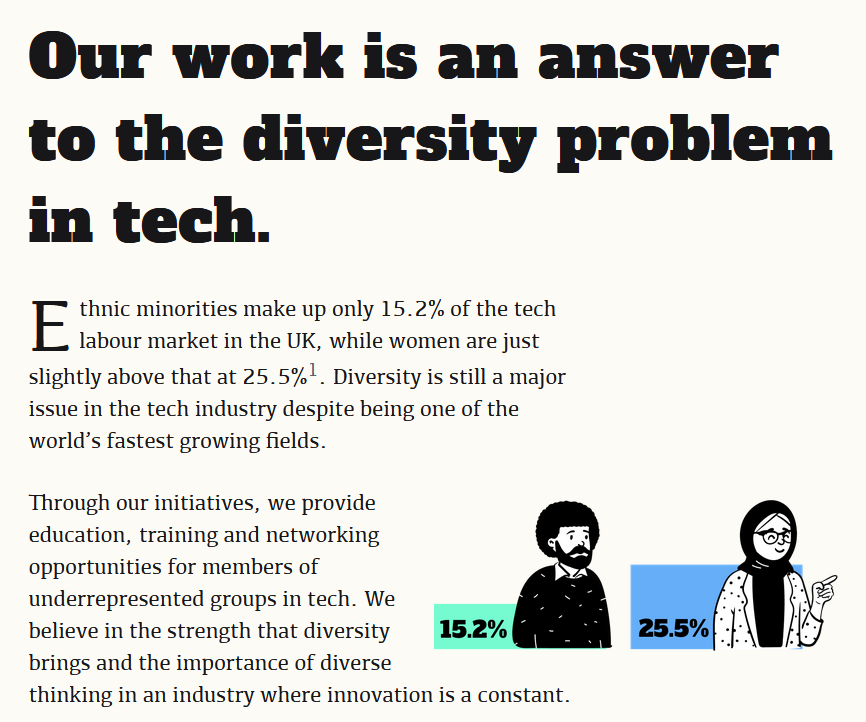
If you haven’t heard about Codebar yet, it’s a wonderful charity that helps build a diverse tech community by offering free regular programming workshops for minority groups in tech. Over the past year, I’ve had the pleasure of being a tutor and presenter at several Codebar workshops in Shanghai. Today, I’m thrilled to share that I’ve joined the team of Codebar organizers. I’ve witnessed firsthand the incredible impact Codebar has on female and underrepresented coders, and I’m proud to step into this larger role. Here’s to many more inspiring workshops ahead!


15.03.2024
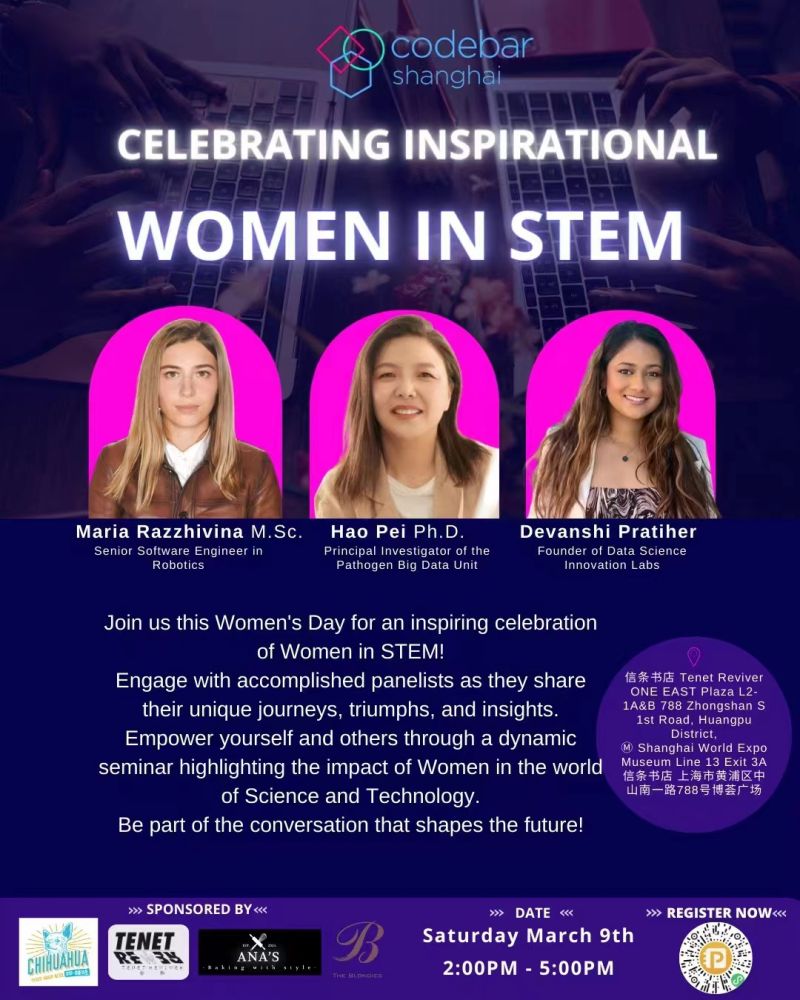
'Women in STEM' sharing
Last weekend was truly special as I had the privilege of participating in the Women's Day event organized by Shanghai Codebar. It was an absolute honor to share the stage with esteemed professionals like Dr. Hao Pei and Devanshi Pratiher. Dr. Hao Pei's groundbreaking research and Devanshi Pratiher's incredible journey in data science were both deeply inspiring. I enjoyed exchanging insights with them and engaging with the audience. Looking forward to more enriching experiences at future Codebar events!

19.02.2024
IJCAI 2024 Conference demo video published
On Feb 19, 2024, we published a demo video for our paper titled 'Do you remember the future? Weak-to-Strong Generalization in 3D Object Detection.' Our paper was accepted for the demo track at the upcoming IJCAI 2024 Conference in Jeju, South Korea. We are excited to visit and share our work!

21.05.2023
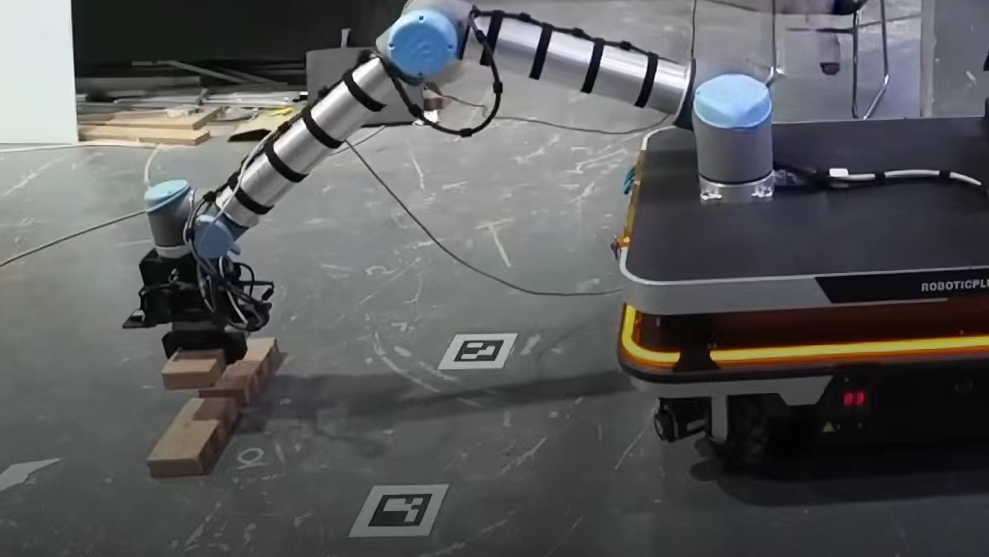
Mobile robots for construction
At RoboticPlus in Shanghai, one of the most memorable projects was development of a mobile platform-based robotic arm assembly for construction tasks. We focused on integrating SLAM and computer vision systems to improve fabrication precision. We also integrated stereo vision for precise 3D mapping and merged 2D data with LIDAR for enhanced perception. ROS was instrumental in ensuring seamless communication and efficient operation planning. "



13.04.2023
GenAI : Sharing on generative AI and fabrication
I was recently invited to speak at a GenAI event in Shanghai, where I presented on the topic of "Generative AI and robotic fabrication."
My goal was to explore the intersection between generative AI models and their physical realization, showcasing a few compelling case studies from my professional experience.